Un quadcopter es una máquina muy ágil que es capaz de seis grados de libertad. Los rotores están conectados a su motor individual que les permite moverse a diferentes velocidades, permitiendo que cada rotor proporcione empuje y torque
La prioridad vital es mantener el quadcopter estable. Esto se logra utilizando "amortiguación artificial a través de la retroalimentación de la velocidad de rotación y de traslación ... Para el movimiento rotatorio, esto se usa de forma conveniente al usar las velocidades angulares medidas utilizando las velocidades angulares medidas por los giroscopios integrados, y esto se realiza típicamente a un nivel alto velocidad (500-1000Hz) en el controlador de vuelo incrustado a bordo.
Componentes
Chasis

El esqueleto de un quadcopter es el chasis (chasis), algunos motores y hélices conectadas al chasis. Los aficionados que desean montar algo con un peso adicional, como una cámara, recomiendan un marco más resistente para más peso.Sin embargo, agregar un material más resistente generalmente crea más peso en sí mismo, lo que hace que requiera hélices más largas y un motor más fuerte para poder compensar el aumento de peso. Siempre existe un equilibrio delicado entre los fabricantes entre la velocidad de vuelo, la maniobrabilidad y el tiempo de vuelo.
Motores
El elemento que eleva y mueve las helices. Cuanta mas potencia tengan mas aire pueden empujar y por tanto levantar mas peso.Existen de distintos tamaños y potencias para muy diversos usos.
Sin embargo, más rápido no siempre es mejor. Un giro más rápido del motor requiere mucha más potencia de la batería, lo que hace que los tiempos de vuelo disminuyan. Más RPM también disminuyen la vida útil del motor a largo plazo. Verás que esto se conoce típicamente como 'quemar'.

Helices

Las hélices afectan en gran medida la velocidad a la que vuelan los cuadricópteros, la carga que pueden transportar y la velocidad a la que pueden maniobrar. Las hélices más largas pueden lograr una sustentación más fuerte a menores revoluciones que una hélice más corta, pero tardan más en acelerarse y en desacelerarse. Cuanto más rápido quieras ir, más agresivo será el lanzamiento que desees. Si quieres ir a un lugar rápido, un tono más alto podría ser apropiado. Elegir la hélice adecuada es crucial para un buen vuelo.
Controlador electrónico de velocidad ESC
La siguiente parte necesaria es un componente electrónico llamado control de velocidad electrónico, o ESC. Hay un ESC para cada uno de los cuatro motores del quadcopter.
Un ESC suministra la corriente modulada adecuada a los motores, que a su vez producen velocidades de giro correctas tanto para la sustentación como para la maniobra. Hay menos cosas que considerar con un ESC que con otros componentes, ya que son una parte bastante estándar, pero hay dos pequeños factores.Como son la intensidad y el voltaje.

Controlador de vuelo
El controlador de vuelo es básicamente la pequeña computadora que controla la nave e interpreta las señales que envía el receptor para guiar el quadcopter. Para los constructores de cuadricópteros, la elección de un controlador de vuelo es una opción más personal en muchos aspectos, a diferencia de la elección de varios procesadores de PC en el mismo rango de potencia. Cada uno tiene varias opciones que cada fabricante quiere y puede o no ser personalizable.
Controlador electrónico de velocidad ESC
Consiste en un componente que se conecta al controlador de vuelo, para recibir señales, y un controlador para transmitirlas. Hay muchos receptores muy sencillos que funcionan bastante bien con controladores de vuelo Quadcopter estándar.
Disponen de varios canales, dependiendo del uso, puede oscilar desde 2 canales los mas basicos hasta 16.Los mas estandar suelen tener 6-8 canales.

Bateria

Es la encargada de alimentar al dron.Existen muchos tipos de baterias pero usualmente se utilizan baterias lipo( ion litio) que son mucho mas potentes.La mayoría de los quadcopters vienen con un cargador de batería especialmente diseñado para la batería. Es importante usar el que te proporcionan. Controla cuánta corriente se envía a la batería. Cargar una batería LiPo por encima del 100% podría provocar un incendio. Asegúrese de cargar las baterías en un área segura contra incendios (lejos de objetos inflamables). Deje que el tiempo de la batería se enfríe antes de volver a cargar.
Fisica de vuelo de los drones
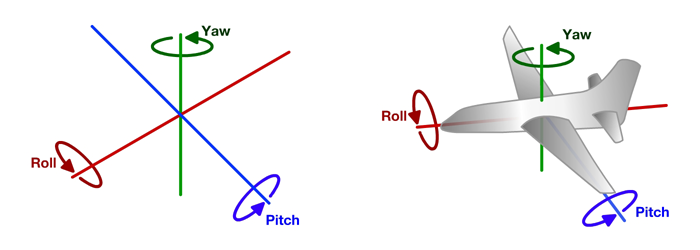
Sistema de coordenadas multirotor
{kind=link}
Coordenadas
- El ángulo de balanceo del multirotor describe cómo se inclina la nave de lado a lado. La rotación alrededor del eje del balanceo es como inclinar la cabeza hacia uno de sus hombros. Inclinar el multirotor hace que se mueva hacia los lados
- El ángulo de inclinación del multirotor describe cómo se inclina la nave hacia adelante o hacia atrás. La rotación sobre el eje de cabeceo es como inclinar la cabeza para mirar hacia arriba o hacia abajo. Lanzar el multirotor hace que se mueva hacia adelante o hacia atrás.
- El ángulo de guiñada del multirotor describe su rumbo, o, en otras palabras, la rotación de la nave mientras permanece nivelada al suelo. La rotación sobre el eje de guiñada es como cuando sacude la cabeza para decir "no".
Roll and Pitch
-Para que el multirotor gire alrededor de los ejes de balanceo o cabeceo, el controlador de vuelo hace que los motores de un lado del multirotor giren más rápido que los motores del otro lado. Esto significa que un lado del multirotor tendrá más sustentación que el otro lado, haciendo que el multirotor se incline.
- Entonces, por ejemplo, para hacer que un cuadricóptero ruede hacia la derecha (o gire sobre el eje del balance en sentido horario), el controlador de vuelo hará que los dos motores del lado izquierdo del multirotor giren más rápido que los dos motores del lado derecho. El lado izquierdo de la nave tendrá más sustentación que el lado derecho, lo que hace que el multirotor se incline.
- De manera similar, para hacer que un quadcopter se incline hacia abajo (gire sobre el eje del pitch en el sentido de las agujas del reloj), el controlador de vuelo hará que los dos motores en la parte posterior de la nave giren más rápido que los dos motores del frente. Esto hace que la nave se incline de la misma manera que tu cabeza se inclina cuando miras hacia abajo

Multicopter PI-tuning
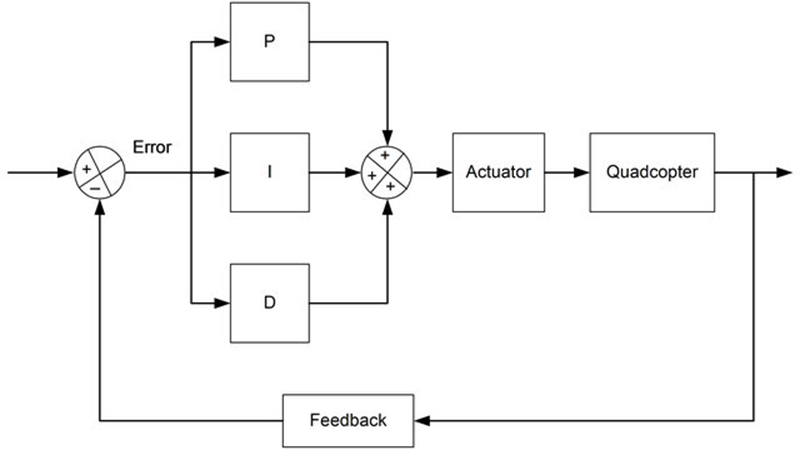
Algoritmos de corrección PID
Hay tres parámetros que un piloto puede ajustar para mejorar la estabilidad del quadcopter>>> PID
Hay 3 algoritmos en un controlador PID, son P, I y D, respectivamente. P depende del error presente, I en la acumulación de errores pasados, y D es una predicción de errores futuros, basada en la tasa de cambio actual. Estos algoritmos de controlador se traducen en líneas de código de software.
{kind=link}
Vuelo Acrobático
- requiere un P un poco más alto
- requiere un poco más I
- aumentar D
Vuelo Suave y tranquilo
- requiere un P ligeramente menor
- requiere un poco más alto I
- disminuir D
return to index next page