Tipos
Las placas de control normalmente ejecutan una de familia de 'Software / firmware de control de vuelo. Los dos más comunes son Cleanflight y Betaflight. Pero hay muchos más,cada placa de hardware tiene una serie de software y firmwares compatibles,por lo que es necesario encontrar los correspondientes a cada uno.
Vamos a echar un vistazo a los diferentes firmwares de FC, así como a lo que estan destinados a hacer.Muchos de estos firmware tienen la capacidad de volar aviones de ala fija, así como otros UAV (vehículos aéreos no tripulados). Algunos incluso pueden estabilizar vehículos terrestres y robots, pero por el momento nos mantendremos enfocados en cómo se relacionan con los multicopteros.
Para los principiantes, yo personalmente recomiendo Betaflight,cleanflight,InaV,Baseflight porque son los firmwares más utilizados y con mas documentacion,ademas funcionan muy bien out of the box y sin apenas calibracion. Ademas las placas para este tipo al ser modulares y multiconfigurables permiten expandir las opciones de acuerdo a las necesidades y gustos de cada piloto. Convirtiendolas en muy buenas opciones tanto economicas como de expansion.
CleanFlight

Un proyecto de código abierto que salió de Baseflight. Cleanflight está diseñado para competir y ahora tiene un gran enfoque en mejorar el código para mejorar la resistencia de los pilotos y facilitar actualizaciones seguras y confiables para desarrolladores y usuarios también. Una de las últimas características agregadas ha sido nuevas características en torno a los OSD.
Baseflight
Baseflight fue uno de los primeros firmware de FC de 32 bits ampliamente utilizado, basado en el firmware del controlador de vuelo Multiwii de 8 bits. Hoy en día, Baseflight no se está actualizando y se considera que es un firmware desactualizado / muerto.

Betaflight

Betaflight se bifurcó de Cleanflight para centrarse en la vanguardia de las nuevas características y rendimiento de vuelo disponibles para mini quads, de ahí el nombre Beta -flight.
INAV
INav, como su nombre lo indica, se orienta más hacia la navegación y las características autónomas, como las misiones de Waypoint voladoras y las funciones de Regreso a casa (RTH). También se nutre de Cleanflight y se beneficia de un código fuente abierto, una buena gama de soporte de destino y actualizaciones regulares también. Si está interesado en más de ese estilo de vuelo UAV / Drone, esta es definitivamente una opción para explorar.

KISS

Keep It Super Simple, es el concepto utilizado aquí. KISS fue desarrollado por Flyduino, que fabrica componentes multirrotores desde 2011. Es un firmware propietario (de código cerrado) y algo dependiente de las interfaces de hardware (muy parecido a los productos de Apple). El engranaje y el software KISS son ampliamente utilizados y confiables, y también se mantienen bastante actualizados con respecto a dónde está progresando el hobby (el desarrollo de código cerrado es más lento que el de código abierto).
OpenPilot
Uno de los primeros desarrollos de firmware FC de fuente abierta para multirrotores que influyó en algunas progresiones importantes en las opciones de firmware de control de vuelo. OpenPilot fue descontinuado y reemplazado por LibrePilot en 2015

¡SEGURIDAD PRIMERO!
En los siguientes pasos, haremos algunas cosas que pueden ser peligrosas. Conectaremos la batería y haremos girar los motores. No coloque las hélices hasta que llegue a esa etapa justo antes de volar.
Hay una pequeña posibilidad de que ocurra algo durante la configuración que hará que el modelo se encienda, ¡y puede ponerse muy peligroso si las helices están colocadas!
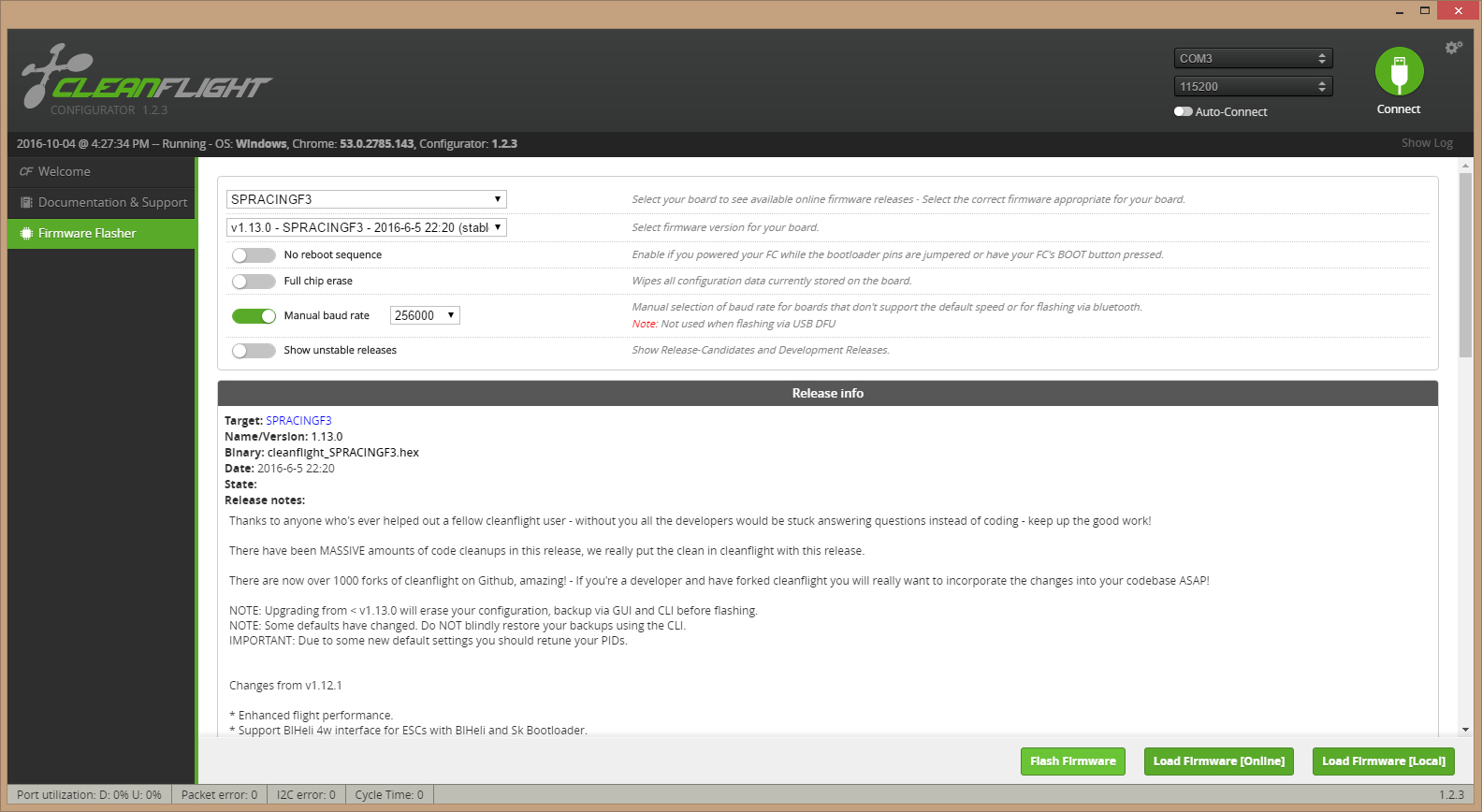
Paso 1: Actualice el software en el controlador de vuelo
Ya hemos conectado el controlador de vuelo a la computadora y descargamos Cleanflight para ver si el controlador de vuelo esta bien antes de conectar o soldar algo. Muchos proveedores instalan softwares anticuados , por lo que actualizarlos y tener las ultimas versiones de software es un paso que merece la pena. Personalmente, me gusta actualizar a la última versión, las configuraciones como los PID generalmente cambian entre versiones y los ultimos algoritmos y valores ayudan a tener un vuelo mas suave.
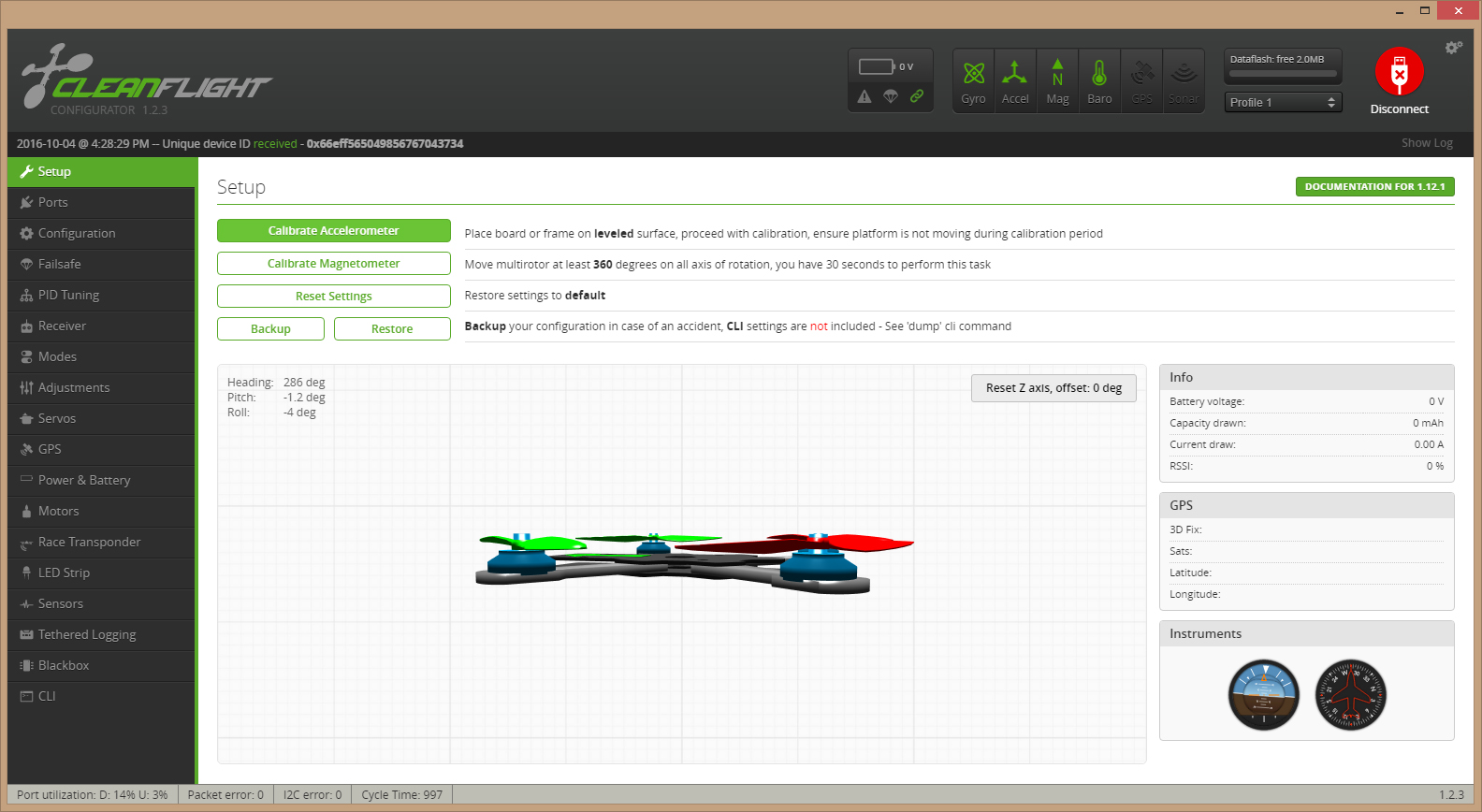
Paso 2: Calibra los sensores
Una vez tenemos la última versión,lo primero que tenemos que hacer es calibrar el acelerometro y giroscopio. Estos son los sensores en el controlador de vuelo que detectan la posición de la inclinación del modelo. Son vitales en todos los modos, pero especialmente en aquellos que proporcionan funciones de nivel automático.
Esta configuracion se ve a medida que el modelo se mueve en la GUI de la pantalla,es facil de hacer pero sin una calibración precisa, el modelo no sabe que el "nivel" debería ser más propenso a la deriva y las características de vuelo inesperadas.Por lo que tenemos que realizarlo en una mesa plana y sin mover el modelo. hasta que aparezca completamente nivelado en la pantalla.
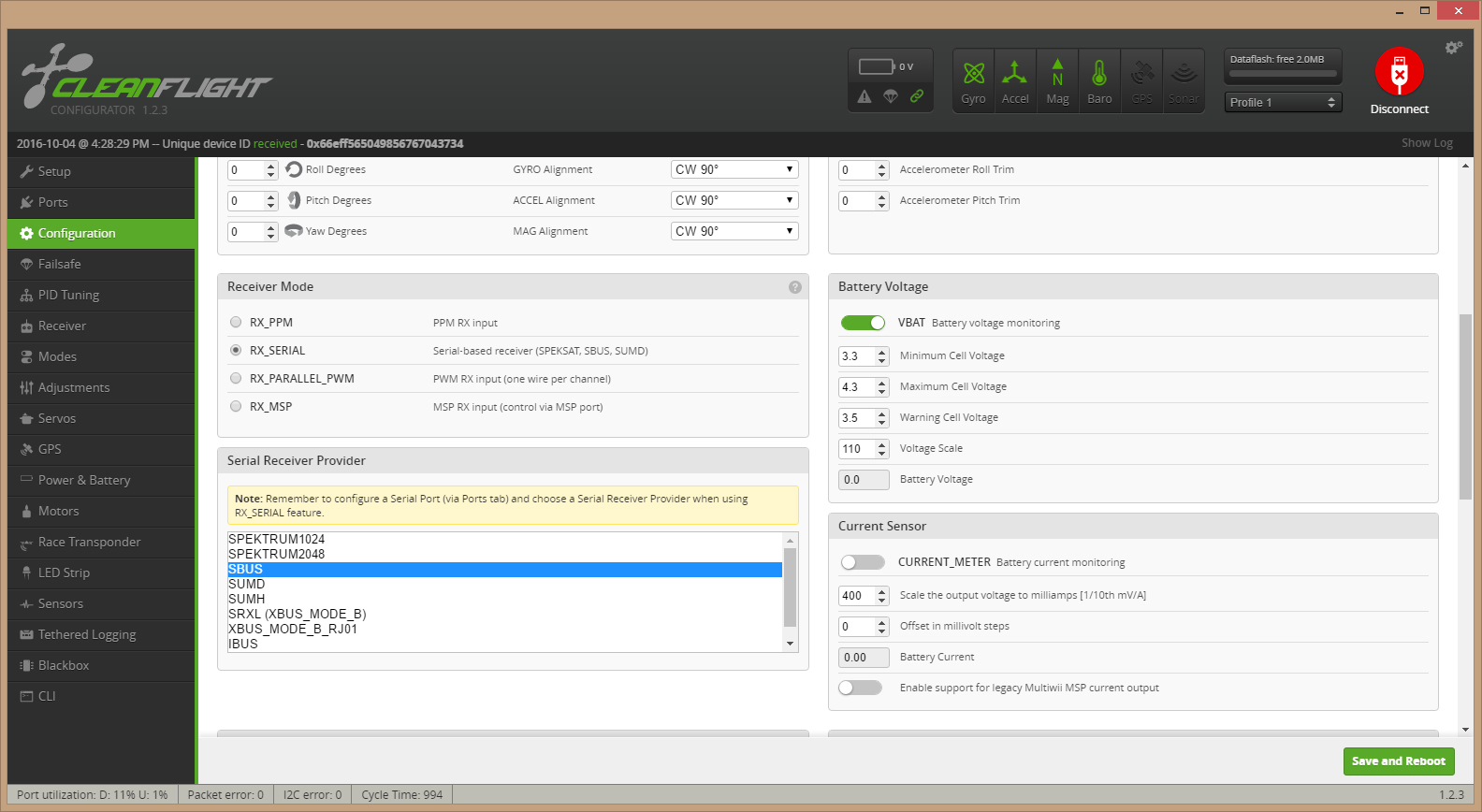
Paso 3: configura el tipo de receptor que tienes
El siguiente paso es configurar el tipo de receptor de radio que tenemos. Revisamos los tipos comunes en apartados anteriores pero existe también soporte para receptores mas modernos y compactos como satélite y protocolos como iBus. En la pestaña 'Configuración', selecciona el tipo de conexión que tienes. NOTA: En Cleanflight, la GUI se ha actualizado, de modo que si no puede encontrar la configuración para el receptor, vaya a la parte inferior de la pestaña "Receptor". Betaflight, iNavflight y otros aún tienen la configuración de la radio en la posición que se muestra en la imagen.
Para PWM, simplemente seleccione esa opción y haga clic en guardar y reiniciar en la esquina inferior derecha. Para PPM, seleccione PPM y guardar y reiniciar en la esquina inferior derecha.
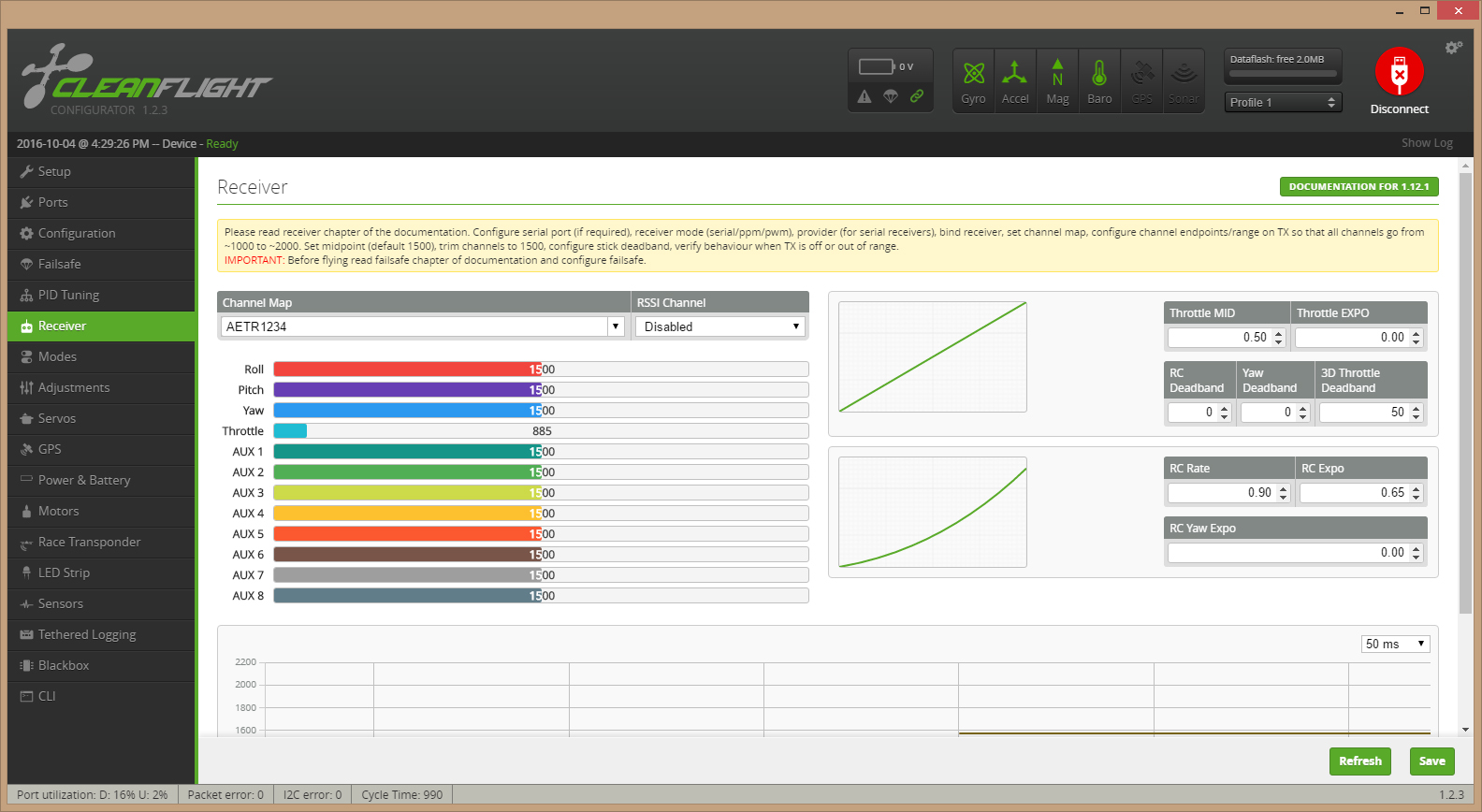
Paso 4: Verifica que la radio funcione como debería
En la pestaña 'Radio', mueve las palancas de la radio y deberías ver cómo se mueven las barras en la pantalla. Si los controles están moviendo las barras incorrectas, simplemente prueba cada una de las configuraciones de "Mapa de canales" hasta que coincidan. Los valores del canal deberían aumentar a medida que los palos se muevan hacia arriba o hacia la derecha. De lo contrario, invierta ese canal en la radio para arreglarlo.
Mientras mueve los controles, asegúrese de que cada canal se mueva desde justo por encima de 1000 hasta justo por debajo de 2000. Si van más allá de este rango, utilice el "ajuste de punto final" en su radio para reducir el recorrido levemente. Intento obtener un rango de recorrido de 1020-1980 para el acelerador, el elevador, el timón y el alerón
Armado de seguridad
El armado se puede hacer con un interruptor o el movimiento del acelerador y el control del timón. Por defecto, se selecciona el armado por los controles de la radio. Con la batería todavía conectada, empuje el acelerador a la posición más baja derecha y verá un pequeño triángulo de advertencia iluminado en la parte superior de la pantalla. El modelo está armado (¡por eso no instalamos los accesorios!).
Ahora que todo está completo, entonces necesitamos probar que el failsafe en el receptor de radio está configurado. No tener un sistema de seguridad que reduzca el acelerador a cero y devuelva los controles a la posición neutral puede aumentar drásticamente las posibilidades de una "fuga" si hay un problema de radio. Arme el tablero y aumente el acelerador ligeramente, luego apague la radio; el acelerador debería volver a cero.
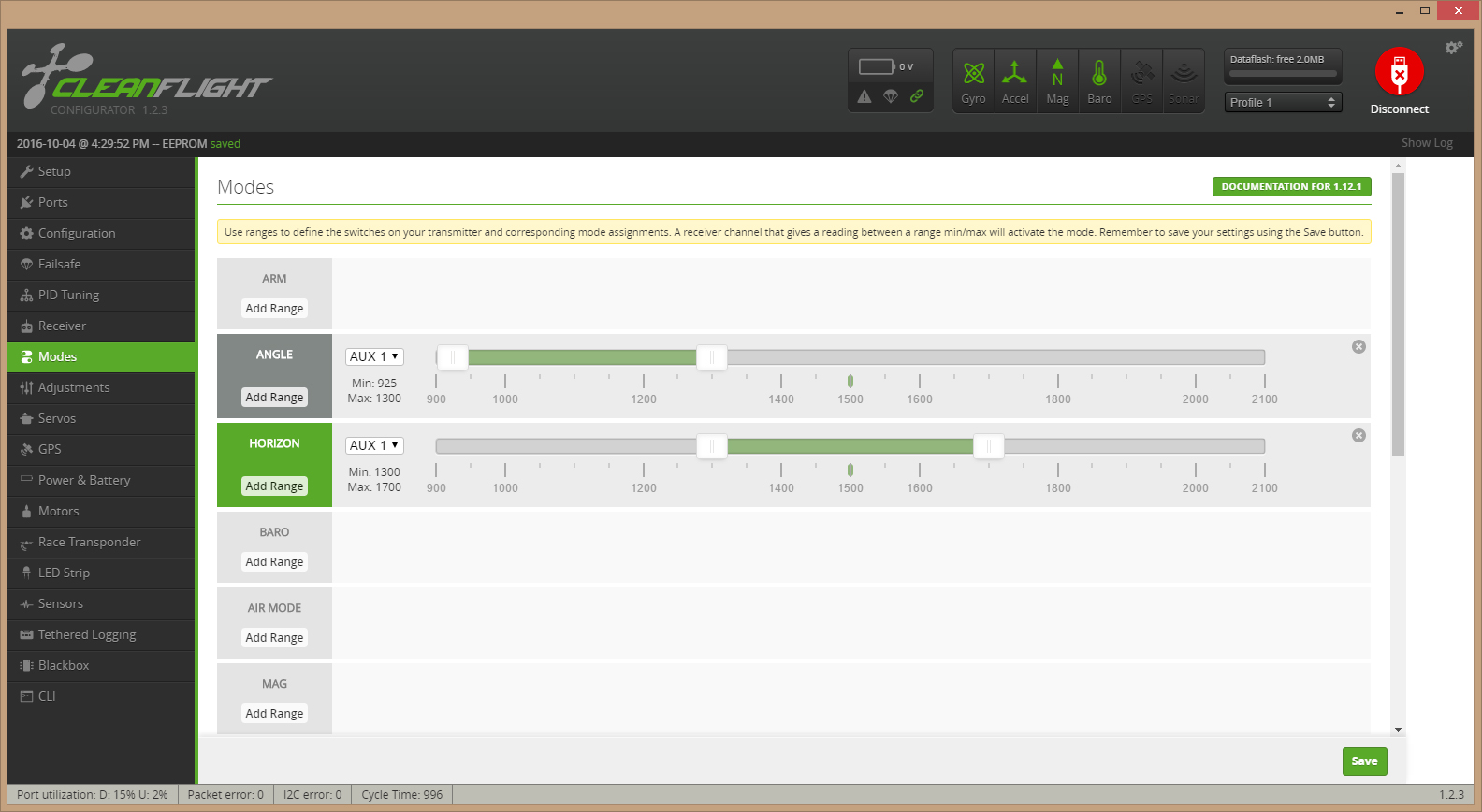
Paso 5: configurar los modos de vuelo
Vamos a agregar un quinto canal extra para controlar los modos de vuelo. Muevemos la palanca de control en la radio y veamos qué canal en la pestaña 'Radio' se mueve. Normalmente será Aux1.
Mientras mueve los controles, asegúrese de que cada canal se mueva desde justo por encima de 1000 hasta justo por debajo de 2000. Si van más allá de este rango, utilice el "ajuste de punto final" en su radio para reducir el recorrido levemente. Intento obtener un rango de recorrido de 1020-1980 para el acelerador, el elevador, el timón y el alerón
Con ese clic confirmado en la pestaña de modos de vuelo, aquí podemos configurar qué modos se activará la posición de ese interruptor. Seleccione el control como Aux1 y luego configure los modos como en la imagen, una vez configurado, haga clic en 'Guardar'. Mueva el interruptor y debería ver la pequeña barra moverse debajo de los ajustes y el modo elegido resaltar a la izquierda.
Modo de ángulo:
El modo que autonivela, ¡perfecto para nuevos pilotos y para pruebas! Utilizar este como el modo para armar ya que el drone se autonivel perfectamente permitiendo un vuelo calmado. Perfecto para la próxima prueba.
Modo Acro:
Esto es para pilotos experimentados. ¡No hay nivel automático y el dron rotará en cualquier direcion y se pondrá boca abajo!Prueba solo este modo si te encuentras muy comodo volando en horizonte.
Modo Horizonte:
Como piloto, una vez que se encuentre comodo volando en modo Ángulo, este modo le permite le permite voltearse y empujar los limites hasta el borde, al estabilizar el dron en vuelo normal y permitir maniobras agresivas.
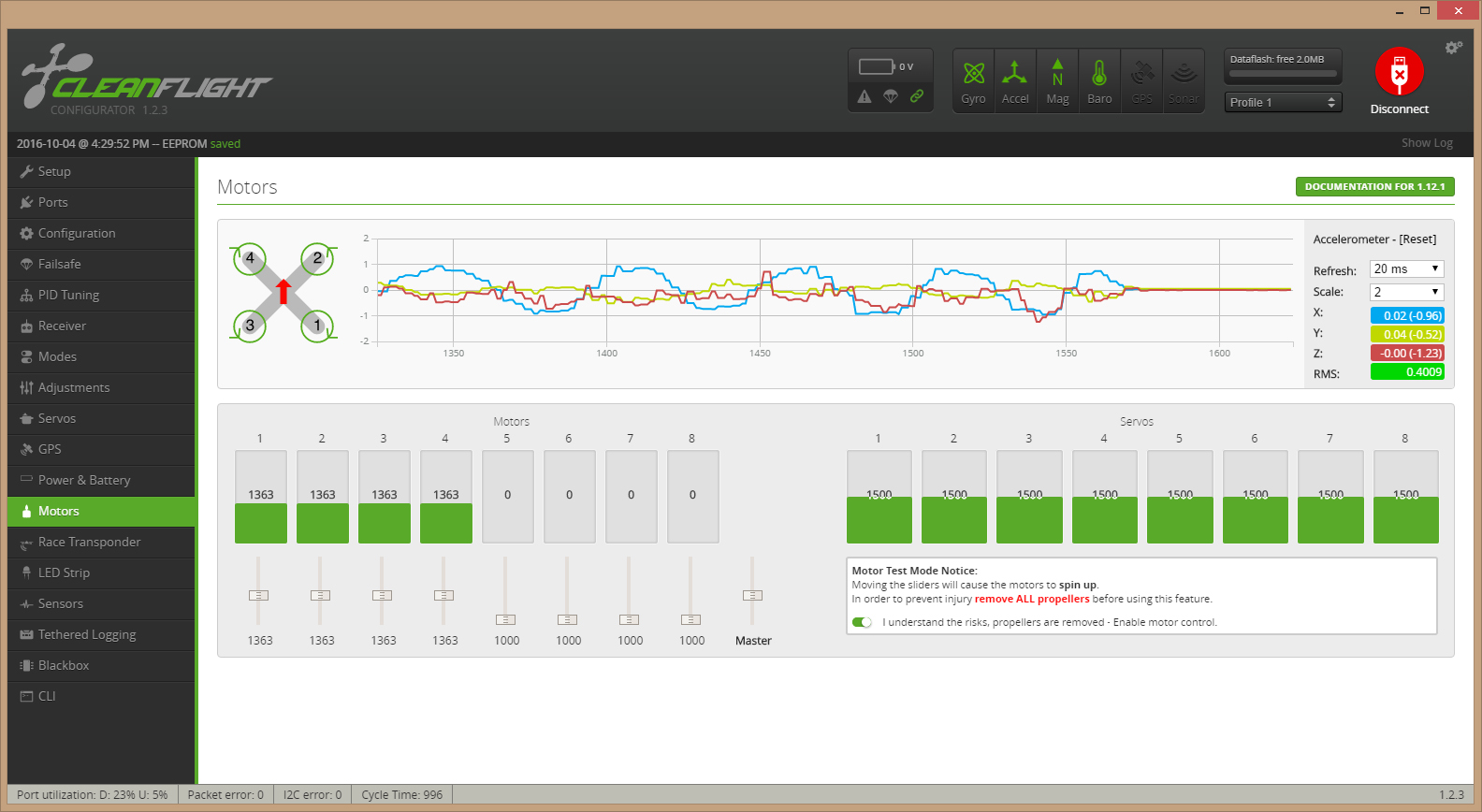
Paso 6: Calibrar ESC
odos los ESC necesitan ser calibrados. La calibración enseña a cada una de las ESCs cuál será el alcance del acelerador para volar. Ingrese a la pestaña de motores y, con la batería desconectada, y haga clic en la pestaña de advertencia. Levante el acelerador principal hacia la posición superior y conecte la batería, espere los pitidos de los ESC y luego presione el control principal del acelerador hasta su posición más baja y los ESC emitirán un tono de confirmación. Desenchufe la batería.
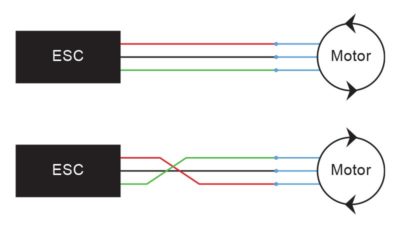
Si ahora enchufa la batería, arma el modelo y eleva el acelerador, todos los motores deberían comenzar exactamente al mismo tiempo, de lo contrario, repita el proceso. También verifique que cada uno de los motores esté girando en la dirección correcta y, si no, intercambie dos de los tres cables que conectan el ESC al motor para invertirlo.
Nota
Si uno o varios motores giran en la dirección inversa como deberían, puede cambiar la dirección de rotación cambiando dos de los cables ESC-MOTORES.
return to index next page
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}